コベルコ建機が重機作業をテレワーク化! オペのクラウドマッチングに向け現場を可視化
2021/04/2816:35配信

コベルコ建機は2018年から「誰でも働ける現場」をテーマに掲げ、中長期的な研究開発を進めています。
重機の遠隔操作システム「K-DIVE」もその中核を担うシステムです。
開発のロードマップを3つのステップに分け、これまで「近距離での遠隔操作」(ステップ1)、「遠距離での遠隔操作」(ステップ2)の開発を行ってきました。
2020年には、約300km離れた北海道の札幌市と帯広市の間で、光ファイバーケーブルを経由して建機を遠隔操作する実証実験なども成功させています。
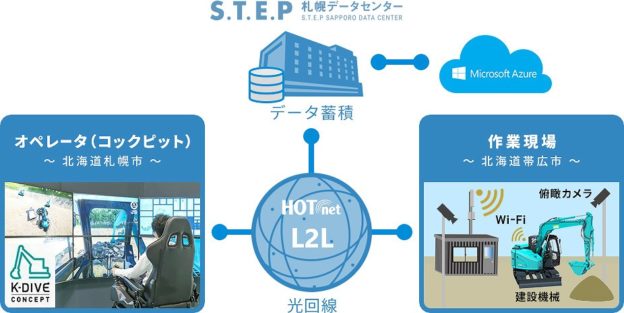
2020年に北海道札幌市と帯広市の間で行われた建機の遠隔操作実証実験イメージ(以下の資料、写真:特記以外はコベルコ建機)

札幌市にいるオペレーター(左)が、約300km離れた帯広市のバックホー(右)を遠隔操作することに成功した
そして、最終段階のステップ3では、テレワークの重機オペレーターと現場を、
ナ、ナ、ナ、ナント、
クラウドマッチング
で仲介することにより、特定の人・場所・時間などの制約を受けずに、施工できるようにするというのです。(コベルコ建機のプレスリースはこちら)

K-DIVEが最終的に目指すイメージ。テレワーカーの重機オペレーターと現場をクラウドでマッチングし、特定の人や場所、時間の制約なしに現場で働けるようにする
これが実現すると、例えばある造成現場で稼働するバックホーに、今日は札幌のオペレーター、明日は広島のオペレーターというように、手の空いているオペレーターが日替わりで乗って働くことも可能になるのです。
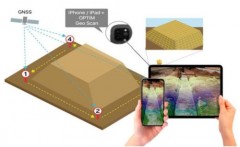
しかし、現場作業をテレワーク化するためには、その現場の状況をよく把握しておく必要があります。例えば、重機周辺の現場状況や埋設物の有無、土の形や体積などです。急斜面や水たまりなどに気を付ける必要があります。
そこでコベルコ建機は、ドローンによる3D点群計測などを展開するセンシンロボティクス(本社:東京都渋谷区)と協業し、
現場の見える化
システムの開発で協業することになりました。
- 1
- 2
タグ
最終更新:2021/04/2817:21