「AI」のタグ一覧 (54件中41~54件を表示)
-
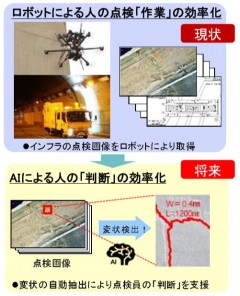
教師データを提供!国交省がインフラ点検用のAI開発を支援へ
コンクリートのひび割れ発見や道路舗装の異常発見など、公共インフラの維持管理に、AI(人工知能)が使われ始めています。 ICT(情報通信技術)を活用して、建設分野の生産性向上を目指す「i-Construction」を推進する国土交通省は、構造物点検などに使われるAIの研究開発を促進するため、「AI開発支援プラットフォーム」の設立を検討しています。 現在のインフラ点検では、ドローンやロボットがインフラのデータを収集し、人間の専門家がそれを見て異常を発見していますが、将来はAIを使って ナ、ナ、ナ、ナント、 人の「判断」を効率化 することを目指しているのです。(国土交通省のプレスリリースはこちら) AIによって人の判断の効率化を目指すイメージ(以下の資料:国土交通省) 国交省は「AI開発支援プラットフォーム」の設立について検討するため、「AI開発支援プラットフォームの開設準備ワーキング・グループ」(以下、AI-PF準備WG)を設け、2018年11月と2019年7月に会合を開きました。 メンバーを見ると、大手建設コンサルタントや電気・通信メーカー、調査・研究機関などそうそうたるメンバーがそろっていることがわかります。 このメンバーで検討しているのは、AIが現場のデータから異常などを発見させるための教育に使われる 良質な”教師データ”の提供 を行うことです。 AI開発支援プラットフォームでは「教師データ」の提供を目指している 例えば、コンクリートのひび割れ発見を行うAIを開発する場合、コンクリート表面の写真とセットで「ひび割れ部分」を示したデータを大量に読み込ませます。 これに使われるのが教師データですが、数百、数千という膨大な数のデータを、各社が準備することは大変です。 そこで、土木技術者の正しい判断をもとにした良質な教師データを国が整備し、人工知能開発者に提供しようというわけです。 もともとAIの開発者は、あまりインフラの現場とは縁がありません。こうした現場データが大量に提供されると、本来のAI開発業務に集中できるので、インフラ点検用AI分野への参入者も増えそうですね。
2019/09/09 10:51 株式会社イエイリ・ラボ
-
BIMのフロントローディングを徹底追求!清水建設が「Shimz DDE」を本格運用
BIM(ビルディング・インフォメーション・モデリング)で建物を設計するとき、設計の初期段階で様々な検討を行う「フロントローディング」(業務の前倒し)という言葉がよく使われます。 例えば、斜線制限や日影規制を満たす範囲で、建物の面積や、建物に当たる日射量や適切な窓配置を行うといった空調性能などを、BIMモデルを使ってシミュレーションし、最適なものを選ぶ、といった業務を意味します。 建物の面積計算(以下の資料、写真:清水建設) 建物に当たる日射量の計算 建物の温熱快適性PMVの分布検討 自然換気シミュレーション 清水建設は、設計の初期段階に行うこれらの検討に、高度なコンピュテーショナルデザイン手法を採り入れたプラットフォーム「Shimz DDE(Digital Design Enhancement platform)」を構築し、全社の設計部門で本格的な運用を開始しました。 検討に使うツールは、3Dモデリングソフト「Rhinoceros(ライノセラス)」と、そのアドインソフト「Grasshopper(グラスホッパー)」を核にして、意匠、構造、設備の分野を横断する、 ナ、ナ、ナ、ナント、 数十種類に及ぶソフト の機能を統合しているのです。(清水建設のプレスリリースはこちら) コンピュテーショナルデザイン手法を統合した「Shimz DDE」のツール。意匠、構造、設備に関する数十種類の機能がある この「Shimz DDE」を使って建設された建物の例として、「東急コミュニティー技術研修センター NOTIA」があります。東京都内に建設された延べ床面積2446.73m2、地下1階 地上5階建てのRC+S併用構造です。 東京都の事務所用途ビルとしては初めて、1次エネルギー75%削減を達成した「Nearly ZEB」の建物となりました。 東急コミュニティー技術研修センター NOTIA で、いったい、どんなところに「Shimz DDE」が使われたのかというと、斜線制限や日影規制、天空率といった法規制の検討や、温熱快適性や屋外気流などの環境性、そして周囲の建物とのプライバシーを保ちつつ昼光を利用するといった検討、構造部材の最適化などです。 設計に使われた「Shimz DDE」の機能
2019/09/04 11:17 株式会社イエイリ・ラボ
-
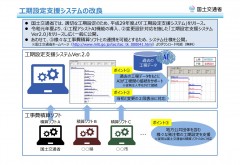
工期設定支援システム Ver2.0 を公開します ~地方公共団体を含む様々な発注者の工期設定をサポート!~
令和元年8月29日 国土交通省 大臣官房技術調査課 国土技術政策総合研究所 国土交通省は、建設業の働き方改革の更なる促進を図るため、平成29年11月から国土交通省ホームページ内の週休2日応援サイトにおいて公開している「工期設定支援システム」を改良し、本日から Ver2.0(http://www.mlit.go.jp/tec/tec_tk_000041.html)を公開します。 この改良により、「工程アシスト AI 機能の導入」「変更設計対応」「地方公共団体利用に向けた対応」が可能となります。 国土交通省では、本年6月に改正施行された「公共工事の品質確保の促進に関する法律」の一部を改正する法律において、発注者等の責務に適正な工期の設定が規定されたことを踏まえ、地方公共団体等も含めた受発注者双方の業務負担の軽減を図るため、現在公開中の「工期設定支援システム」の改良を行いました。 主なシステム改良の内容 [1]工程アシストAI機能の導入(令和元年8月29日より公開) 過去の工事工程表からAIを用いて類似工事を検索・抽出し、工程表を作成するアシスト機能を強化。 [2]変更設計対応(令和元年8月29日より公開) 変更設計に対応し、当初と変更のバーチャート2段表示機能を追加。 [3]地方公共団体利用に向けた対応(令和元年9月2日より公開予定) 地方公共団体で使用している積算システムでも工期設定支援システムが利用可能となるよう、必要なデータ仕様を公開。 添付資料 報道発表資料一式(PDF形式:381KB) お問い合わせ先 国土交通省大臣官房技術調査課 辛嶋、永瀬 TEL:03-5253-8111 (内線22353、22355) 直通 03-5253-8221 FAX:03-5253-1536 国土技術政策総合研究所社会資本マネジメント研究センター社会資本システム研究室 関、北見 TEL:029-864-2211 (内線3721、3741) 直通 029-864-7863 FAX:029-864-2547 出典:国土交通省 (http://www.mlit.go.jp/report/press/kanbo08_hh_000616.html)
2019/08/29 15:17 KENKEY
-
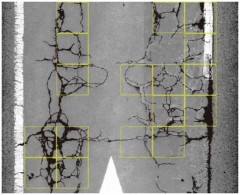
AIでコンクリのひび割れ発見!あの「ひびみっけ」がNETIS登録されていた
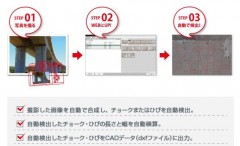
富士フイルムの「ひびみっけ」というクラウドサービスは、コンクリート表面の写真をアップロードすると、AI(人工知能)によってひび割れやチョークのある場所を見つけ出し、写真上にトレースしたり、DXFのCADデータにしたりして送り返してくれるユニークなサービスです。 「ひびみっけ」のサービスイメージ(資料:富士フイルム) 今日、久しぶりに「ひびみっけのウェブサイト」を訪ねたところ、新しいニュースが追加されていました。 ナ、ナ、ナ、ナント、 国土交通省のNETIS に登録されたというのです。 国交省の「NETIS」に登録されたニュースが追加されていた「ひびみっけ」のウェブサイト(資料:富士フイルム) NETISとは「新技術情報提供システム」の略で、民間が開発した新技術の活用を促進するため、国土交通省が運用しているデータベースサイトです。 このデータベースに登録されている新技術を使うと、建設会社にとっては工事成績評定や総合評価方式の入札で加点されるというメリットがあります。 富士フイルムの「ひびみっけ」は、2019年7月18日に「NETIS登録番号:KT-190025-A」として登録されました。 NETISに登録された「ひびみっけ」の情報(資料:NETISサイトより) 期待される効果など(資料:NETISサイトより) 気になる利用料金ですが、ひび割れを見つける場合は、 写真1枚400円から と、非常にリーズナブルです。 また、チョークを見つける場合は写真1枚800円からとなっていますが、ひび割れを発見する場合に比べて写真の解像度が低くてよいため、コンクリート表面1平方メートル当たりの単価は半分くらいになります。 利用料金など(資料:富士フイルム) AIのシステムを自社で開発するのは大変ですが、写真を送るだけで気軽にAIが使えるのはありがたいですね。 これからの建設業は、少子高齢化による人手不足に対応していく必要があります。求人に力を入れるのも大切ですが、このようなAIシステムを探して活用するという戦略も重要になってきそうです。
2019/08/27 10:45 株式会社イエイリ・ラボ
-
AIで床と壁を区別!間取り図をCAD化するサービスのモニター募集中
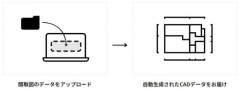
中古マンションのリノベーション工事などでは、竣工時の間取り図を設計者がCADソフトを使ってトレースする作業がつきものです。 しかし、紙図面上に描かれた1本1本の線を、「これは壁」「これは床のフローリング」と見分けるのは、これまで人間が判断するしかなかったので、地道に手作業で行うしかありませんでした。 そこでGAテクノロジーズ(本社:東京都港区)は、この作業を自動化するクラウドサービス「BLUEPRINT by RENOSY(ブループリント バイ リノシー)」を開発、この秋からβ版を無償公開することになりました。 紙図面をスキャンして、このシステムにアップロードすると、 ナ、ナ、ナ、ナント、 AIで壁やドアなどを判別 し、DXF形式のCADファイルに変換してくれるのです。 AIを使って間取り図をCAD化する「BLUEPRINT by RENOSY」のサービスイメージ(以下の資料:GAテクノロジーズ) スキャンした間取り図をCAD化するまでの流れ 間取り図に描かれた壁やドアなどの建築要素や、トイレや流し台などの設備要素を、AI(人工知能)のディープラーニング技術によって見分けるのが、このサービスのポイントです。 具体的には、ディープラーニングの「敵対的生成ネットワーク(GAN)」や「Faster R-CNN」といった手法で図面の中から壁やドア・窓を認識し、トレースしていきます。 「BLUEPRINT by RENOSY」によって見取図をCAD化した例 流し台と一言で言っても、様々な表現スタイルがある しかし、例えば「流し台」といっても、メーカーや時代によって様々なスタイルで表現されているため、ちょっとやそっとのディープラーニングでは、なかなか変換精度が向上しません。 2019年7月30日現在の平均認識率は、80%とのことです。残りの20%は、人間の手で修正する必要がありますが、作業は一から手作業を行うより、かなり楽になりそうですね。 しかし同社は、さらなる前進を目指しています。図面の認識率を上げるため テストユーザーを募集 し、より完成度の高いシステムへと進化させようというのです。 テストユーザーになりたい人は、「BLUEPRINT by RENOSY」のサイトにアクセスしてユーザー登録を行います。 その後、スキャンした間取り図をアップすると、登録したメールアドレスに約5分でCAD化されたデータが送られてくるという仕組みです。 「BLUEPRINT by RENOSY」の使い方 「BLUEPRINT by RENOSY」のウェブサイト このサイトを運営するGAテクノロジーズは、AIを利用した中古不動産流通サイト「RENOSY」や、不動産業務支援ツール「Techシリーズ」などの開発、運営などを行っており、東証マザーズにも上場している注目の企業です。 AIは自分で開発するのは大変ですが、こうした公開サービスを利用するという方法で自社の生産性を上げることもできますね。
2019/08/23 18:45 株式会社イエイリ・ラボ


-
穴ぼこ直前予知や一般車活用も!ニチレキ、リコーがAIによる道路管理を提供
舗装道路の維持修繕にかかわる予算が大幅に減少する一方、地方公共団体が管理する道路は膨大なため、もはやすべてをオーバーレイ(既設舗装上にアスファルト混合物の層を重ねる工法)などの修繕工事で対応することが難しくなっています。 舗装面の一部がはがれて、「ポットホール」のような穴ぼこができたら、後で補修するという事後対策に頼らざるを得なくなりつつあるのです。 こうした現状を踏まえて、ニチレキはNTT東日本、NTTコムウェアと共同で、AI(人工知能)による「局部損傷」診断技術を開発し、2019年度中にサービス提供を目指しています。 舗装道路の点検時に撮影した路面の写真画像をAIが解析することで、 ナ、ナ、ナ、ナント、 穴ぼこ発生直前 の「緊急性の高い要修繕箇所」を自動的に発見することができるのです。(ニチレキのプレスリリースはこちら) AIによって抽出された「局部損傷」のイメージ。ポットホールが発生する前に修繕を行える(資料:ニチレキ) 従来の道路診断AIは、路面の50cm角メッシュに含まれるひび割れの本数をカウントして「ひび割れ率」を求めるものがほとんどでした。しかし、穴ぼこが発生しそうな箇所を見つけるという目的には適していません。 そこでNTTコムウェアの画像認識AI「Deeptector」を使って、メッシュ内に含まれるひび割れの交点(結節点)の個数を数え、ランク分け評価する方法を採用しました。 ひび割れの交点である「結節点」の個数から局部損傷を見つけることができる(資料:ニチレキ) 穴ぼこが発生して補修する方法だと、路面はますます傷んでしまい、補修費用も急上昇しそうです。また、自転車やバイクなどは穴ぼこによって転倒するなどの危険もありますね。 このシステムによって、穴ぼこ発生前に路面補修ができれば、修理コストも安く、通行の危険もありません。 ニチレキでは、局部損傷向けに開発した「常温表面処理工法」を積極活用することで、補修工事の低コスト化も追求しています。 従来の加熱アスファルト混合物を使った補修(左)に比べて、常温のアスファルト乳剤を使った補修(右)は長持ちし、CO2の発生量が少なく、コストダウンできる(資料:ニチレキ) このほか、リコーは複数台のステレオカメラを搭載した車両を使って、道路の「ひび割れ率」、「わだち掘れ量」、「平たん性」を自動算出する「リコー 路面モニタリングサービス」を昨日(2019年8月1日)、提供開始しました。 一般車両をベース にしているため、計測装置の製作や維持管理の費用が安く、測定結果の算出や報告書の作成も自動化できるので、点検コストを大幅にコストダウンすることができます。(リコーのプレスリリースはこちら) 路面性状モニタリングシステムを搭載した一般車両(写真:リコー) 50cm角のメッシュごとに、AIがひび割れの本数を自動カウントして分類する(資料:リコー) また、取得した「ひび割れ率」、「わだち掘れ量」、「平たん性」から維持修繕の判断指標である「MCI(Maintenance Control Index)値」を算出し、地図上にマッピングすることで道路の劣化状態を見える化することもできます。 地図上にマッピングされたMCI値。舗装の劣化状態が一目でわかる(資料:リコー) アスファルト舗装やコンクリートなどの表面にできたひび割れの発見や処理は、もはや人間よりもAIの方が得意になったと言えそうです。 調査はAIに任せて、人間はそのデータやドライバー・地域住民の声などをもとに、道路の補修計画を練るという本質的な業務に集中するというのが、予算減、人手不足時代の道路管理のスタンダードになりそうです。
2019/08/02 11:00 株式会社イエイリ・ラボ
-

ロープウエー型ロボで3Dモデル化!凸版印刷とイクシスがインフラ点検システム開発
少子高齢化による労働力不足に対応するため、インフラの点検・維持管理分野では、構造物を一度、3Dモデルやデジタル写真などのデータにしてから、コンピューターを使って損傷箇所を見つけたり、管理したりという方法が導入されつつあります。 そこで問題となるのが、インフラの3Dモデル化です。これまではドローン(無人機)による空撮や、3Dレーザースキャナーを使って点群データ化する方法が使われてきましたが、橋梁のように狭くて複雑な部分がある構造物の内部では、高精細な画像を取得するのが困難でした。 そこで凸版印刷とイクシス(本社:川崎市幸区)は、両社の独自技術を融合させて「社会・産業インフラ向け三次元形状計測・生成・解析プラットフォーム」を共同開発することになりました。 構造物の写真を撮るのに使われる方法には、 ナ、ナ、ナ、ナント、 ロープウエー型ロボット も使われるのです。(凸版印刷のプレスリリースはこちら) 構造物の写真撮影に使われるロープウエー型ロボット「Rope Stroller」(写真:イクシス) イクシスが開発したワイヤつり下げ型目視点検ロボット「Rope Stroller」というものです。橋脚の間にワイヤを水平に架設して、これにぶら下がって移動しながら、中央に取り付けたカメラで構造物に近づいて写真撮影できるものです。 風やワイヤの張り方で本体が傾いても、中央に搭載したジンバル(雲台)機構が働いて、カメラを一定の向きに固定します。 電源は外部から電源ケーブルで給電し、操作もLANケーブルで遠隔操縦します。 Rope Strollerの本体部(写真:イクシス) 橋桁下での使用イメージ(資料:イクシス) 橋桁裏を撮影した写真(写真:イクシス) 橋梁の点検では、ドローンを使った方法も行われていますが、風に弱い、構造物との接触が心配、長時間の連続飛行が難しいなどの問題もあります。 その点、このロープウエー型ロボットは、ワイヤさえ張れば、長時間、じっくりと撮影ができるのでいいですね。また、ワイヤを上下方向に張れば、煙突や立て配管なども撮影できるそうです。 こうして撮った写真から3Dモデルを作るのが、凸版印刷の技術です。同社は民生品のデジタルカメラで撮影した写真だけを使って、高精度の3Dモデルを自動的に生成する技術を持っています。 写真から3Dモデルを作る「フォトグラメトリー」と言われる技術の肝となるのが、複数枚の写真に写った同一点を探し出し、対応させる後術ですが、凸版印刷の場合、 1画素以下の精度で推定 することができるのです。 地表の撮影写真(左)から自動生成した3Dモデル(右)(資料:凸版印刷) また、イクシスはAI(人工知能)による空間の解析や、BIM(ビルディング・インフォメーション・モデリング)、CIM(コンストラクション・インフォメーション・モデリング)を使った制御技術も持っていますので、出来上がった3Dモデルを解析する作業でも、強みを発揮しそうです。 両社はこのシステムが、社会・産業インフラの現場で広く活用されるプラットフォームになることを目指して共同開発を推進し、インフラ点検企業との実証実験なども行っていきます。そして2020年度中の提供開始を目指すとのことです。 「社会・産業インフラ向け三次元形状計測・生成・解析プラットフォーム」のイメージ図(資料:凸版印刷) このプラットフォームについては、2019年7月24日から26日まで、東京ビッグサイトで開催される「第11回インフラ検査・維持管理展」で、イクシスのブース(W1-G37)で展示される予定ですので、ご興味のある方はどうぞ!
2019/07/10 10:51 株式会社イエイリ・ラボ
-
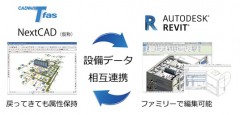
TfasとRevitが相互連携!属性付き設備BIMモデルをRevitで編集可能に
最近、設備設計でもBIM(ビルディング・インフォメーション・モデリング)が使われるようになり、建築設計用のBIMソフトとのデータ連携による干渉チェックや、干渉部分の設計変更などで施工段階での手戻り防止に効果を上げています。 ただ、これまでは設備用BIMソフトで作ったBIMモデルをIFC形式というオープンな共通フォーマットで建築用BIMソフトで読み込むことが一般的でしたが、手作業によるデータ変換や修正の手間がかかっていました。 そこで設備用BIMソフト「CADW’ell Tfas」(以下、Tfas)を開発元ダイテックと、建築用BIMソフト「Revit」の開発元オートデスクは2019年1月に両ソフトを ナ、ナ、ナ、ナント、 双方向で連携 させることを発表していましたが、その機能がこのほど実現したのです。(ダイテックのプレスリリースはこちら) TfasとRevitの双方向データ連携イメージ(以下の資料:ダイテック) この双方向データ連携機能は、「Tfas 11」に搭載されています。 データ連携の方法はまず、Tfasで設備BIMモデルを作り、「Revit連携ファイル」を書き出します。そしてRevitを開いてこのファイルを読み込むだけです。 すると、Revit上で設備BIMモデルをいろいろな方向から見て確認したり、編集したりすることができるのです。 まず、TfasでRevit連携ファイルを書き出す 次に、Revitで連携ファイルを読み込む 配管やダクトが躯体などと干渉している部分があれば、即座にRevit上で修正できるので便利ですね。修正後のBIMモデルは、再びTfas側に渡すことができます。属性情報はそのまま保たれるので、助かりますね。 Tfasは今、進化の真っ最中です。2019年12月には、次世代BIMアプリ「CADW’ell Linx」としてリリースされる予定です。 ダイテックが5月24日に発表したプレスリリースを見ると、属性情報付きでメーカー機器のBIMオブジェクトを取り込む機能や、法規・施工要領のチェック機能のほか、 AIを活用した自動作図 機能なども搭載される予定です。 次世代BIMアプリ「CADW’ell Linx」のコンセプト AI(人工知能)による設計の自動化は、BIMによる設計業務の生産性をさらに高めるものとして期待できますね。
2019/06/28 10:38 株式会社イエイリ・ラボ
-
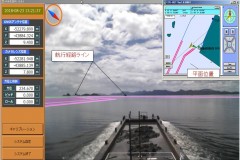
海面に“道”が見える!東亜建設工業が港湾工事用に「ARナビ」を開発
港湾工事や海上工事などで使う起重機船や浚渫(しゅんせつ)船などの操縦は、道路上でクルマの運転をするのと違って難しさがまるで違います。 というのも、海の上は海面しか見えないので、ナビゲーションシステムがあったとしても道路に相当する航路や、浅瀬などの危険エリアなどが視界のどのあたりにあるのが、直感的にわからないからです。 そこで東亜建設工業は、作業船の航行時に航路や浅瀬、航行禁止エリアなどを、映像と音声でわかりやすく表示するシステムを開発しました。 カメラで撮影した周囲の海面映像の上に、 ナ、ナ、ナ、ナント、 ARで航路などを表示 する「ARナビ」というシステムなのです。(東亜建設工業のプレスリリースはこちら) ARナビで見た前方の海面。航路が直感的にわかる(以下の資料:東亜建設工業) 航路からはみ出していないか、施工現場はどこかといったことがわかりやすく表示される このシステムは、現在の位置や方位情報を取得するGNSS(全地球測位システム)方位計、映像を撮影するカメラ、そしてノートパソコンというシンプルな機器構成なので、様々な船舶に簡単に搭載できます。 また監視レーダーやAIS(自動船舶識別装置)によって得られた情報から、付近を航行する他の船舶の船名や速度、距離など表示することも可能です。 進入禁止エリアに接近した場合や、航行経路が計画と違う場合は、オペレーターに映像や音声でアラート(注意喚起)を行います。 「ARナビ」の機器構成。シンプルなので様々な船舶に簡単に搭載できる レーダーやAISで取得した情報から他の船舶の船名や速度、距離なども表示できる そして、この「AR」ナビは工事用車両に搭載すると、 大規模造成工事 でも、毎日変わる現場の通行ルールなどをわかりやすく提供できるのです。 確かに、大きな造成現場は周りに地面しか見えないので、海の上と同様に位置の手がかりがありませんからね。 東亜建設工業では今後、港湾工事を中心にこのシステムを導入し、検証を重ねていくほかカメラ映像の同様低減や、AI(人工知能)による小型船舶や浮遊物の検出などの機能拡張を図っていくとのことです。
2019/06/25 11:06 株式会社イエイリ・ラボ
-

AIが手書き平面図を3Dモデル化!CSTが「ALTA AIスケッチ」を発売
ホームビルダーや工務店の受注合戦では、施主にプランを提案するとき、CGパースが不可欠になりつつあります。 そこで施主の要望を聞いた営業担当者は、間取り図を作成後、設計部や外部の会社に頼んでCG化することになりますが、完成までに時間やコストがかかっています。 こうした問題を解決する画期的なソフトが、コンピュータシステム研究所(以下、CST)から発売されました。手書きで作った間取り図を ナ、ナ、ナ、ナント、 AIで3Dモデルに自動変換 してくれるのです。(CSTのプレスリリースはこちら) AIで手書き間取り図を3Dモデルに自動変換するイメージ(以下の資料:コンピュータシステム研究所) このソフトは同社の建築事業者向け住宅プレゼンシステム「ALTA」のオプションとして開発されたもので、「ALTA AIスケッチ」というものです。 A4サイズの専用方眼紙に、消せるボールペン(黒、太さ0.7mm)で間取りや建具、部屋名を記入し、屋根形状や内外装のパターンを選択します。 記入に定規は不要で、フリーハンドで書いていけます。 この方眼紙をスマートフォンで撮影し、クラウドサーバーにアップすると、AI(人工知能)によって自動的に間取り図を3Dモデルに変換してくれます。 そのデータを、パソコンにダウンロードし、住宅プレゼンシステム「ALTA」に取り込むと、住宅の3Dモデルが表れるというわけです。 手書き間取り図が3Dモデルになるまで この3Dモデルのプランは ALTAで編集できる ようになっています。CSTはこのシステムを特許出願中とのことです。 気になるお値段ですが、「ALTA AIスケッチ」と専用方眼紙10枚、消せるボールペン1本がついて30万円(税別)です。このほか、「ALTA」が別途必要になります。また、方眼紙はコピーして使えます。 建設業界の人手不足解消のため、頭脳労働の助っ人としてAIの活用に期待が高まっていますが、このソフトは買えばすぐに使えるので、AIを社員化する感覚で試してみるのもいいですね。
2019/06/12 09:59 株式会社イエイリ・ラボ
-

日本をデジタルツイン化!国交省が“バーチャル・ジャパン”を構築へ
国土全体を3Dモデル化し、その中にリアルタイムな「属性情報」を入れ込むことで、巨大な「デジタルツイン」(電子の双子)として様々なシミュレーションやビジネスに生かす取り組みが各国で進んでいます。例えば、シンガポール全土を3Dモデル化した「バーチャル・シンガポール」などが知られていますね。(詳しくは、イエイリラボブログ2016年1月29日付けの記事を参照) バーチャル・シンガポールのイメージ(資料:NRF) 令和の時代を迎えた日本も、遅まきながらこれに似たプロジェクトが始まりました。国土交通省は2019年5月30日、「国土交通データプラットフォーム(仮称)」の整備計画を策定したことを発表しました。その内容はまさに、 “バーチャル・ジャパン” といっても過言ではないものなのです。(国土交通省のプレスリリースはこちら) 国土交通データプラットフォームの利活用イメージの一つ、「スマートシティ」(以下の資料:国土交通省のプレスリリースより) その目的は、国交省が保有するデータと民間のデータを連係させ、現実空間としての日本をサイバー空間に再現した「デジタル・ツイン」を構築することです。その成果を、業務の効率化やスマートシティなど国交省施策の高度化に生かすとともに、産学官連携によるイノベーションの創出を目指します。例えば、都市の3次元データに道路交通や公共交通、人流などのデータを組み合わせることで、MaaS(モビリディー・アズ・ア・サービス)など新たな交通サービスを導入したり、スマートシティーの実現を図ったりします。また、ドローンによる荷物配送や、VR(バーチャル・リアリティー)・AR(拡張現実)を利用して観光を疑似体験できるようにすることも想定しています。 ドローンによる荷物配送のイメージ VR・ARによる観光振興のイメージ このほか、SIP4D(基盤的防災情報流通ネットワーク)と連携して、災害発生時はインフラの被害状況や通行止め情報などを提供するなど、防災関連での活用も想定しています。 データのセキュリティーについては、誰もが自由にアクセスできる「レベル0」から、省内関係者や受注者などに限定して公開される「レベル3」まで分類する方針です。国交省の計画によると 2020年までに3D地図表示 を行えるようにするとともに、3D地図にひも付ける国土、産業活動、自然現象に関するデータ基盤を構築します。そして2022年度末には、これらのデータ基盤を3Dモデルと連携させてデータの吸い上げや提供を行えるようにします。 データプラットフォームの整備スケジュール これまで縦割りだった行政も、このデータプラットフォームを軸に新しい連携が始まるかもしれませんね。そして日本の国土を「IoT」(モノのインターネット)やAI(人工知能)によって、少ない人数でより効果的に運用していくための第一歩としても期待したいです。
2019/05/31 14:45 株式会社イエイリ・ラボ
-

AIで損傷判定!押して歩く「床面ひび割れ検知ロボ」をイクシスが発売
物流倉庫や工場などの維持管理では、床面のひび割れなどの損傷状況をチェックし、記録するという業務があります。 これまではフロア内の作業が止まっている夜間に作業員がフロアを歩きながら床面の損傷を見つけ、写真撮影などで記録するという方法が採られてきました。 この作業を軽減するため、業務用ロボットの開発を手がけるイクシス(本社:川崎市)は、床面ひび割れ検知ロボット(手動式)「Floor Doctor」を開発、発売しました。 ナ、ナ、ナ、ナント、 押して歩くだけ で、床面の撮影と位置情報をセットで取得し、図面との重ね合わせができるのです。(イクシスのプレスリリースはこちら) 床面ひび割れ検知ロボット(手動式)「Floor Doctor」(以下の写真、資料:イクシス) 「イクシス」のウェブサイト。ロボットやAI、IoTに強そうだ ロボットといえども、「手動式」とうたっているように、自転車のハンドルやブレーキのようなものが付いています。 車輪には移動距離計測用センサーが搭載され、赤色レーザーで床面に撮影範囲が表示されます。このレーザー光を頼りに直線的に進みながら、床面の撮影を行うのです。 手元のモニターには、カメラの実映像が表示されるので、撮影範囲を視覚的に確認できます。 そして、撮影した画像は AIで損傷判定 を行うことにより、検査報告書の作成時間を短縮することができます。 AI(人工知能)によるひび割れなどの検知システムは、いろいろな会社で開発されていますが、もはや人間の目視による点検よりも高性能な域に達しています。 今回は手動式のロボットですが、これがお掃除ロボのように自動的に走行するようになると、床面の点検や損傷部分の発見も無人で行えるようになりそうですね。
2019/05/27 18:41 株式会社イエイリ・ラボ
-

コベルコ建機株式会社と日本マイクロソフト株式会社の協業について
2019年5月22日 コベルコ建機株式会社 日本マイクロソフト株式会社 コベルコ建機株式会社(本社:東京都品川区、代表取締役 社長:楢木 一秀、以下、コベルコ建機)と日本マイクロソフト株式会社(本社:東京都港区、代表取締役 社長:平野 拓也、以下、日本マイクロソフト)は、クラウドやAI、IoTなどの先進テクノロジーを活用して、コベルコ建機の目指す「働く人を中心とした、建設現場のテレワークシステム」K-DIVE CONCEPT※1推進のために協業することとし、本日5月22日に「建設・測量生産性向上展2019」のコベルコ建機ブースにて発表をおこないました。 今回の協業のファーストステップとして、“K-DIVE CONCEPT”にマイクロソフトのパブリッククラウドプラットフォームMicrosoft Azureを採用し、オペレーションの円滑化、可視化、ならびに効率的なコミュニケーションの実現を図ります。今後、両社は連携して働く人を中心とした建設業界の働き方改革を推進していきます。 コベルコ建機は昨年、「誰でも働ける現場へ・KOBELCO IoT」をテーマにICTロードマップを策定し、その実現に向けて中長期的に研究・開発を進めています。そのひとつの柱であるK-DIVE CONCEPTは、クラウドマッチングシステムにより、特定の人・場所・時間などの制約を受けずに、現場の施工が可能となる「建設現場のテレワーク化」を実現し、深刻化する建設技能者の不足に対する多様な人材活用、現場生産性の向上、現場無人化による本質的な安全確保などを目指しています。 両社はこの実現に向けて、AI、IoT、画像・音声の認識技術※2を用いて、開発期間を大幅に短縮するアジャイル手法により開発を進めるとともに、コミュニケーション基盤を構築し、具体的には以下3つの機能実装を目指していきます。 1.快適・安全な作業環境と実機同等の操作性を実現 2.テレワーク化による働く時間、働く場所の制約解消 3.作業内容とオペレータスキルのマッチング最適化 これらの実現に向けて、コベルコ建機と日本マイクロソフトは全面的に連携し、ビジョンの具体化から最新テクノロジーを活用した課題解決手段の提案、導入までを一貫して進めていきます。 K-DIVE CONCEPTの目指す姿 K-DIVE CONCEPTのステップアップイメージ ※1 “K-DIVE CONCEPT”とは、コベルコ建機が研究・開発を進める、次世代遠隔操縦技術を用いた「働く人を中心とした、建設現場のテレワークシステム」のことで、建設現場で働く人の働き方を大きく変え、豊かな生活、社会を実現することを目的としています。 ※2 具体的には、マイクロソフトの学習済みAIであるCognitive Servicesなどの活用を予定しています。 <建設・測量生産性向上展2019における発表の様子> *記載されている情報は発表時のもので、予告なしに変更される場合があります。
2019/05/22 18:15 コベルコ建機日本株式会社
-

複数の建機を自動連携!キャタピラーと大成建設が無人化施工の実現目指す
大成建設は工事現場の生産性を上げるため、ここ数年「T-iROBO」シリーズと呼ばれる様々な建設ロボットを開発してきました。 現場を無人清掃する「T-iROBO Cleaner」やダム湖に潜って湖底を可視化する「T-iROBO UW」、コンクリート床版の鉄筋結束を自動化する「T-iROBO Rebar」、床仕上げを行う「T-iROBO Slab Finisher」などを紹介してきました。 その大成建設は、土工の生産性をさらに高めるため、キャタピラージャパンとタッグを組み、 ナ、ナ、ナ、ナント、 複数の建機を自動連携 させた無人化施工の実現を目指す取り組みを始めたのです。(キャタピラージャパンのプレスリリースはこちら) 開発のベースマシンとなるのは、電子制御が可能なキャタピラージャパンの次世代油圧ショベル「Cat320」で、掘削やダンプトラックへの積み込み作業などを自動化する技術開発に着手しました。 複数の建機による無人化施工を目指すベースマシンとなる油圧ショベル「Cat320」(以下の写真:キャタピラージャパン) 両社は開発の第一段階として、2014年に開発した巨岩を自動的に小割りする「T-iROBO Breaker」にCat320を実装し、2018年6月に作動テストを行いました。 その結果、Cat320は本体の改造なしで自律割岩システムを作動させることができ、直径1.5m級の岩を90%以上の高い精度で自律作業を行うことができました。 第一段階として実施した自律制御による割岩作業 続いて、第二段階として2018年7月から土砂ピットの掘削とダンプトラックへの積み込み作業を自動化するアルゴリズムの開発を行い、熟練工の運転技術をデータ化。基本的な掘削・積み込み作業の自動化と、ダンプトラックとの連携に注力してきました。 第二段階として取り組んだ自律制御による掘削・積み込み作業の自動化 Cat320には「CAN(Controller Area Network)」と呼ばれるネットワーク規格を採用しており、建設機械内部の各システムやセンサーを統合・連携させた制御が可能になっています。 今回の開発では、CANと外部との相互通信をシンプルかつ高速に行えるようにしました。さすが、もともとICT化が進んだマシンを使うと、無人化施工の技術開発もスピーディーに進みそうですね。 今後、キャタピラージャパンは AIの活用も視野 に入れて、建設機械の作業自動化や無人化施工技術の確立を目指していくとのことです。 土工現場も自動車工場と同じように、無人のロボ集団が黙々と施工を行う時代が、すぐそこまで来ているのかもしれませんね。
2019/05/07 14:59 株式会社イエイリ・ラボ
- 3
- 3

新着お知らせ
ニュースアクセスランキング
-
1
![]()
三菱ふそう 燃費性能を向上した新型6R30エンジンを搭載し、フルモデルチェンジした大型トラック「スー...
2023/10/2611:31 三菱ふそうトラック・バス株式会社
-
2
![]()
BHP 社サウス・フランク鉄鉱山(西オーストラリア ピルバラ地区)へ 41 台の超大型ダンプトラック...
2019/09/0511:12 株式会社小松製作所
-
3
![]()
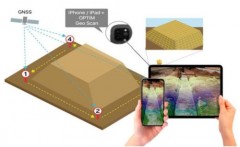
国交省がiPhoneによる点群計測を正式採用へ! 小規模ICT施工への2022年度導入を目指す
2021/09/0817:30 株式会社イエイリ・ラボ
-
4
![]()
清水建設の新東名現場を直撃! そこは“i-Constructionの総合商社”だった
2020/11/0417:50 株式会社イエイリ・ラボ
-
5
![]()
三菱ふそう 金沢支店を移転しオープン
2021/07/2618:12 三菱ふそうトラック・バス株式会社