大成建設がGNSSの届かないトンネル内で建機の自動運転に成功! 日本初の快挙
2021/06/1513:33配信

建設業の人手不足は今後、数十年にわたって厳しくなる一方です。そんななか、建設機械の自動運転技術が大手ゼネコンなどを中心に開発されています。
大成建設もこのほど、国土交通省国土技術政策総合研究所の実大トンネル実験施設で、土砂運搬に使うクローラーダンプの自動運転技術の実証実験を行い、機能を確認しました。

国土交通省国土技術政策総合研究所の実大トンネル実験施設で行われた無人クローラーダンプの自動運転実験(以下の写真、資料:大成建設)
上の写真を見ると、無人建機が平らな道を何気なく走っているだけのように見えますが、何がすごいかというと、
ナ、ナ、ナ、ナント、
GNSS電波が届かない
トンネル内での自動運転に日本で初めて成功したことなのです。(大成建設のプレスリリースはこちら)
GNSS(全地球測位システム)の電波が届かないトンネル内では、自動運転のために必要な位置情報を取得するために自動追尾式のトータルステーションなどの使用が考えられます。
しかし、障害物や曲線部などでは光波が遮られるため、長距離での使用が難しいという課題がありました。
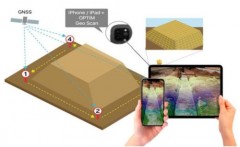
この難問を解決するため、大成建設は無人建機に搭載したセンサーの計測情報から建機の自己位置を推定するとともに、周辺の地図を作成する「SLAM(Simultaneous Localization And Mapping)」という技術を活用し、「T-iDraw Map」というシステムを開発しました。

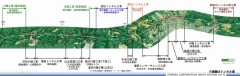
センシング装置で取得したデータをもとに作成した環境地図と建機の自己位置。トンネル内の地図情報が緑点と青点で示され、建設機械位置と走行予定ルートが赤点と青線で示されている
このシステムが開発されたため、GNSSの電波が届かないトンネル内や地下室などでも、あらかじめ設定したルート上を自動運転できる道が開けました。
また、予定した走行ルート上に想定外の障害物があった場合も、センサーで障害物を認識し、
自動で回避ルートを作成
し、減速走行するようになっています。
現場では施工状況に応じて、建機や資材の位置が時々刻々と変化するので、こうした柔軟なルート変更を自動的に行えるのは安心・安全につながりますね。
この自動運転システムは、国内の道路トンネル建設現場でも実証実験が行われました。

実際のトンネル建設現場で行われた自動運転の実証実験
大成建設は今後、「T-iDraw Map」による無人建設機械の自動運転を施工中のトンネル現場に順次導入するとともにホイール式の建設機械への適用を進めていく方針です。
そして、将来的には屋内や地下での自動運転や、災害発生時における探査・点検への適用範囲拡大、そして無人・有人の建設機械が協調して制御する同社の「T-iCraft」システムとの連携を図り、さらなる生産性や安全性の向上を目指していくとのことです。
GNSSに頼らない位置計測技術ができたことは、トンネル現場はもちろん、建築現場の自動化にも大きな前進と言えそうですね。
最終更新:2021/06/1513:43