「T-iCraft ®」のタグ一覧 (3件中1~3件を表示)
-

大成建設がGNSSの届かないトンネル内で建機の自動運転に成功! 日本初の快挙
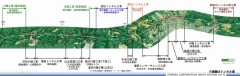
建設業の人手不足は今後、数十年にわたって厳しくなる一方です。そんななか、建設機械の自動運転技術が大手ゼネコンなどを中心に開発されています。大成建設もこのほど、国土交通省国土技術政策総合研究所の実大トンネル実験施設で、土砂運搬に使うクローラーダンプの自動運転技術の実証実験を行い、機能を確認しました。 国土交通省国土技術政策総合研究所の実大トンネル実験施設で行われた無人クローラーダンプの自動運転実験(以下の写真、資料:大成建設) 上の写真を見ると、無人建機が平らな道を何気なく走っているだけのように見えますが、何がすごいかというと、ナ、ナ、ナ、ナント、GNSS電波が届かないトンネル内での自動運転に日本で初めて成功したことなのです。(大成建設のプレスリリースはこちら)GNSS(全地球測位システム)の電波が届かないトンネル内では、自動運転のために必要な位置情報を取得するために自動追尾式のトータルステーションなどの使用が考えられます。しかし、障害物や曲線部などでは光波が遮られるため、長距離での使用が難しいという課題がありました。この難問を解決するため、大成建設は無人建機に搭載したセンサーの計測情報から建機の自己位置を推定するとともに、周辺の地図を作成する「SLAM(Simultaneous Localization And Mapping)」という技術を活用し、「T-iDraw Map」というシステムを開発しました。 センシング装置で取得したデータをもとに作成した環境地図と建機の自己位置。トンネル内の地図情報が緑点と青点で示され、建設機械位置と走行予定ルートが赤点と青線で示されている このシステムが開発されたため、GNSSの電波が届かないトンネル内や地下室などでも、あらかじめ設定したルート上を自動運転できる道が開けました。また、予定した走行ルート上に想定外の障害物があった場合も、センサーで障害物を認識し、自動で回避ルートを作成し、減速走行するようになっています。現場では施工状況に応じて、建機や資材の位置が時々刻々と変化するので、こうした柔軟なルート変更を自動的に行えるのは安心・安全につながりますね。この自動運転システムは、国内の道路トンネル建設現場でも実証実験が行われました。 実際のトンネル建設現場で行われた自動運転の実証実験 大成建設は今後、「T-iDraw Map」による無人建設機械の自動運転を施工中のトンネル現場に順次導入するとともにホイール式の建設機械への適用を進めていく方針です。そして、将来的には屋内や地下での自動運転や、災害発生時における探査・点検への適用範囲拡大、そして無人・有人の建設機械が協調して制御する同社の「T-iCraft」システムとの連携を図り、さらなる生産性や安全性の向上を目指していくとのことです。GNSSに頼らない位置計測技術ができたことは、トンネル現場はもちろん、建築現場の自動化にも大きな前進と言えそうですね。
2021/06/15 13:33 株式会社イエイリ・ラボ
-

大成建設が自動建機の連携プレー! 有人建機にもシステムが指示
大成建設が施工する東京都稲城市の造成現場に、バックホー、クローラーダンプ、ブルドーザー、振動ローラーが勢ぞろいしました。 造成現場に勢ぞろいした建機群(以下の写真、資料:大成建設) これらの建機は、それぞれ、「掘削・積み込み」「運搬」「敷き均し」「転圧」の工程を同時並行で行いますが、ナ、ナ、ナ、ナント、 すべて自動運転 で動くのです。(大成建設のプレスリリースはこちら)これだけ異なる種類の建機が“密”に並んでいると、お互いに衝突したり、作業を邪魔したりしないか心配になりますが、その心配はいりません。というのも、これらの建機は大成建設が開発した自動運転建機の協調運転を制御する「T-iCraft」というシステムで協調運転を行っているからです。その一連の動作を、下記のパラパラ写真でご覧ください。 バックホーで土砂をクローラーダンプに積み込む ブルドーザーのもとに土砂を運ぶクローラーダンプ。その間、振動ローラーは締め固めを続けている ブルドーザーの手前で止まるクローラーダンプ くるりと荷台を180度回転させる そして土砂をダンプ 再びバックホーのもとに戻るクローラーダンプ
2021/02/12 16:43 株式会社イエイリ・ラボ
-

JIG-SAW と酒井重工業は大成建設の自動建機協調制御システム「T-iCraft ®」と 連携し他の建設機械との協調運転の実証実験に成功
2021 年 2月 9日 JIG-SAW 株式会社(本社:東京都千代田区、以下:JIG-SAW)と酒井重工業株式会社(本社:東京都港区、以下:当社)が共同で取り組むロードローラ向け自動操縦等の機能を実用搭載する業界標準機 「Auto-Drive Synchronized Control System(略称:ASCS) for Compaction Equipment※」プロジェクトは 大成建設株式会社(本社:東京都新宿区、以下:大成建設)が開発した自動建機協調制御システム 「T-iCraft ®」と連携し、本振動ローラを含む、他3種類の建機(バックホウ、クローラダンプ、ブルドーザ) との協調制御の実証実験を東京都稲城市の南山造成作業所で実施し成功致しました。 本実証実験により ASCS が短期間で他社の協調制御システムと容易に連携しうる高い汎用性を持つことを確認致しました。 引き続き当プロジェクトは、様々な企業・事業体と連携し、業界標準機の実現に向けて取り組んでまいります。※ASCS for Compaction Equipment プロジェクトについて 当プロジェクトは、下記のとおり、i-Construction分野における盛土等の土木構造物に求められる品質 (剛性・密度等)に重大に影響する締固め工程で用いられる締固め機械に関する自律・制御並びにこれらの自動操縦等の機能を実用搭載する業界標準機開発を目的としています。 JIG-SAW と当社は 2015 年より共同でロードローラ向けの自律走行・操縦システムの共同研究開発及び実証を継続して実施してまいりました。これは当社の建機(ロードローラ)と JIG-SAW が開発する自律走行・操縦ソフトウェアを連携稼働させるもので、実用化・製品化を目指して取り組んできておりましたが、研究開発及びテスト等のプロセスを経て、2019年内に実際の走行・稼働を実現場で実証することが可能なレベルとなりました。 これらを踏まえ、業界標準機を開発するという位置づけを明確にし、より広い範囲で関連業界各社との連携を目指し、JIG-SAW と当社の共同開発を 2019 年 6 月に自動操縦プロジェクト「Auto-Drive Synchronized Control System(ASCS)」の一環として、締固め機械向けに「Auto-Drive Synchronized Control System(ASCS)for Compaction Equipment」を正式な共同開発プロジェクトとする覚書に調印をしています。 プロジェクトは今後もより広範囲での共同体としての展開を予定しています。 なお、当プロジェクトでは、すでに大林組に協力しております総務省の5G 総合実証実験や大成建設のプロジェクト等にも参加しており、今後も建設会社の各プロジェクトへの参画を通じてその機能拡張や実用化に向けた取り組みを強化してまいります。
2021/02/10 12:55 酒井重工業株式会社


- 1
- 1

新着お知らせ
ニュースアクセスランキング
-
1
![]()
三菱ふそう 燃費性能を向上した新型6R30エンジンを搭載し、フルモデルチェンジした大型トラック「スー...
2023/10/2611:31 三菱ふそうトラック・バス株式会社
-
2
![]()
BHP 社サウス・フランク鉄鉱山(西オーストラリア ピルバラ地区)へ 41 台の超大型ダンプトラック...
2019/09/0511:12 株式会社小松製作所
-
3
![]()
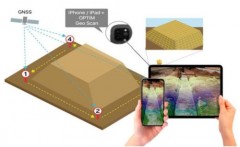
国交省がiPhoneによる点群計測を正式採用へ! 小規模ICT施工への2022年度導入を目指す
2021/09/0817:30 株式会社イエイリ・ラボ
-
4
![]()
清水建設の新東名現場を直撃! そこは“i-Constructionの総合商社”だった
2020/11/0417:50 株式会社イエイリ・ラボ
-
5
![]()
三菱ふそう 金沢支店を移転しオープン
2021/07/2618:12 三菱ふそうトラック・バス株式会社