「振動ローラー」のタグ一覧 (4件中1~4件を表示)
-

三井住友建設がARで転圧回数を見える化! 振動ローラー運転席に透過型ディスプレー
土工事で盛り土を振動ローラーで締め固める作業では、ローラーがその場所を通過した回数で品質管理を行う「工法規定」がよく用いられます。これまではGNSS(全地球測位システム)を活用して振動ローラーの位置を計測し、運転席に搭載したタブレット端末のモニターに締め固め回数を色分け表示するシステムがよく使われてきました。しかし、振動ローラーの運転中に、(1)モニターに目線を動かすために安全性に問題がある、(2)画面が小さいので細かな部分の踏み残しが見えづらい、などの課題もありました。 振動ローラーによる締め固め作業(以下の写真:三井住友建設) そこで三井住友建設は、これら2つの課題を同時に解決する「AR転圧管理システム」を開発しました。AR(拡張現実)の技術を使って、盛り土の転圧回数の色別画像を、ナ、ナ、ナ、ナント、実際の盛り土に重ねて表示できるのです。(三井住友建設のプレスリリースはこちら) 「AR転圧管理システム」を導入した振動ローラーの運転席。各種カメラや加速度センサーなどが取り付けられている AR画像と運転手の視点を合わせる補正は、次の3つの方法で行います。運転席に設置した2台のアイトラッキング(視点計測)カメラが運転手の目の動きを認識し、目線に合わせてAR画像の表示範囲や角度を補正します。また、加速度センサーで車体の前後左右の傾きを自動認識し、AR画像の表示を補正します。さらにGNSSの位置情報に加えて、車両前面に設置した360°カメラで車体の方位を自動認識し、AR画像の表示を補正します。AR画像を現場で見るデバイスとしては、HoloLensのようなMR(複合現実)ゴーグルや、メガネ部分に小型スクリーンを仕込んだスマートグラス、タブレット端末などが使われていますが、このAR転圧管理システムでは、フロントガラスに大型の透過型ディスプレーを搭載しています。 運転席に取り付けられた大型の透過型ディスプレー 透過型ディスプレーとは、映像を表示しつつ、向こう側が透けて見えるディスプレーのことで、最近では透過率80%以上と、ガラスに近い透過度を備えた製品もあるようです。MRゴーグルなどは視界が狭くなることから、工事現場では安全管理上、使いにくい場合もありますが、透過型ディスプレーならそんな心配もいりません。現場や建設機械でMRやARを使うときの新しいツールとして、今後、使われそうですね。
2021/11/30 17:40 株式会社イエイリ・ラボ
-

鹿島、JAXAが“月面テレワーク実験”に成功! 1000km先の振動ローラーを遠隔操作
最近、油圧ショベルやクローラーダンプ、タワークレーンなどの、テレワークを目的とした遠隔操作システムが続々と開発されています。鹿島建設が鹿児島県南種子町で施工中の造成現場でも、このほど無人の振動ローラーが登場し、遠隔操作の実験が行われました。 鹿島建設の現場に登場した無人振動ローラー(以下の写真、資料:宇宙航空研究開発機構、鹿島建設) 無人振動ローラーの遠隔操作を行うオペレーター 1000km以上離れて行われた遠隔操作実験のイメージ 遠隔操作を行うコックピットは、神奈川県相模原市のJAXA相模原キャンパスに設置されました。距離から言うと、2021年5月14日付けのイエイリ・ラボブログ記事で紹介した、キャタピラージャパンによる日米間の遠隔操作実験より短いですが、構想のスケールが違います。ナ、ナ、ナ、ナント、地球から月面の建機を遠隔操作することが目的に行われた実験なのです。(宇宙航空研究開発機構、鹿島建設のプレスリリースはこちら) 月面での無人化施工イメージ この実験は宇宙航空研究開発機構(以下、JAXA)と鹿島建設が共同で行ったものです。実験の内容は、JAXA相模原キャンパスから、1000km以上離れたJAXA種子島宇宙センターの振動ローラーを遠隔操作し、さらに自動運転に切り替えて所定の範囲の締め固めを行うというものでした。 JAXA種子島宇宙センターの造成現場 遠隔操作の手順。月面のクレーターに見立てた仮想障害物を遠隔操作で回避して現場にたどり着き、自動運転に切り替えて25m×15mの範囲を締め固める
2021/05/20 13:00 株式会社イエイリ・ラボ
-

鉄輪で3D点群計測?! ライカと竹中土木がユニークなローラー転圧システムを開発
ライカジオシステムズと竹中土木は、盛り土工事の品質管理を高精度化しようと、画期的な転圧管理システム「Dual Mast Roller」を開発しました。振動ローラーの鉄輪の両側に2本のGNSSアンテナを立て、ライカのGNSS受信機「Leica iCON gps 80」によって鉄輪の位置と方位角を直接、測定するとともに、鉄輪の傾きまでも傾斜計で測定できるようにしたものです。 それだけではありません。地表面を踏んだ鉄輪の幅や位置、方向角、傾斜角の情報を使って、ナ、ナ、ナ、ナント、地表面を点群計測できるようにしたのです。(ライカジオシステムズのプレスリリースはこちら) 鉄輪が踏んだ地表面の部分に点群データができていくイメージ。点群の密度は任意で設定できる オペレーターは運転席のパソコンで点群データを見ながら、点群データに凸凹ができている部分をその場で踏み直すことができます。このシステムが開発されたのは、従来のGNSS(全地球測位システム)を使った締め固め管理で「転圧もれ」という問題があったからです。これまでは土を締め固める振動ローラーの位置をGNSS(全地球測位システム)でリアルタイムに追跡し、盛り土上面の通過回数をカウントする方法がよく使われてきました。しかし、この方法をもう少し精密に見ていくと、問題も出てきます。それは振動ローラーの鉄輪が締め固めを行う位置と、GNSSアンテナの位置がずれていることです。もちろん、前後、左右、上下の「オフセット量」は考慮していますが、オペレーターがハンドルを切ったとき、鉄輪が左右に振れるのでGNSSの位置計測と誤差が生じ、「踏み残し」が起こってしまうのです。 鉄輪の位置とGNSSアンテナの位置の違いは、オフセット量で管理されている オペレーターがハンドルを切ると、鉄輪の位置とGNSSによる計測位置に誤差が生じ、「転圧もれ」につながる
2021/03/04 17:44 株式会社イエイリ・ラボ
-

大成建設が自動建機の連携プレー! 有人建機にもシステムが指示
大成建設が施工する東京都稲城市の造成現場に、バックホー、クローラーダンプ、ブルドーザー、振動ローラーが勢ぞろいしました。 造成現場に勢ぞろいした建機群(以下の写真、資料:大成建設) これらの建機は、それぞれ、「掘削・積み込み」「運搬」「敷き均し」「転圧」の工程を同時並行で行いますが、ナ、ナ、ナ、ナント、 すべて自動運転 で動くのです。(大成建設のプレスリリースはこちら)これだけ異なる種類の建機が“密”に並んでいると、お互いに衝突したり、作業を邪魔したりしないか心配になりますが、その心配はいりません。というのも、これらの建機は大成建設が開発した自動運転建機の協調運転を制御する「T-iCraft」というシステムで協調運転を行っているからです。その一連の動作を、下記のパラパラ写真でご覧ください。 バックホーで土砂をクローラーダンプに積み込む ブルドーザーのもとに土砂を運ぶクローラーダンプ。その間、振動ローラーは締め固めを続けている ブルドーザーの手前で止まるクローラーダンプ くるりと荷台を180度回転させる そして土砂をダンプ 再びバックホーのもとに戻るクローラーダンプ
2021/02/12 16:43 株式会社イエイリ・ラボ


- 1
- 1

新着お知らせ
ニュースアクセスランキング
-
1
![]()
三菱ふそう 燃費性能を向上した新型6R30エンジンを搭載し、フルモデルチェンジした大型トラック「スー...
2023/10/2611:31 三菱ふそうトラック・バス株式会社
-
2
![]()
BHP 社サウス・フランク鉄鉱山(西オーストラリア ピルバラ地区)へ 41 台の超大型ダンプトラック...
2019/09/0511:12 株式会社小松製作所
-
3
![]()
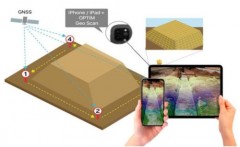
国交省がiPhoneによる点群計測を正式採用へ! 小規模ICT施工への2022年度導入を目指す
2021/09/0817:30 株式会社イエイリ・ラボ
-
4
![]()
清水建設の新東名現場を直撃! そこは“i-Constructionの総合商社”だった
2020/11/0417:50 株式会社イエイリ・ラボ
-
5
![]()
三菱ふそう 金沢支店を移転しオープン
2021/07/2618:12 三菱ふそうトラック・バス株式会社