諸岡 スマートフォンによる不整地運搬車の遠隔操作の実証試験に成功 ! ―「現場のテレワーク」実現に向けて、建設現場の DX の推進 ―
2021/02/0812:47配信

2021 年 2 月 4 日
株式会社諸岡
ARAV 株式会社
株式会社諸岡(代表取締役 CEO:諸岡正美)と ARAV 株式会社(代表取締役:白久レイエス樹) は共同で、遠隔地(12km)にある株式会社諸岡製ゴムクローラ運搬車 MST-2200VD をインター ネットに接続したスマートフォンにより、遠隔操縦することに成功しました。
建設・農林業分野においては労働人口の減少や高齢化が社会問題となっており、生産性 の向上や人手不足の解消は大きな課題の一つです。また新型コロナウイルスの蔓延により人の移動が制限され、オフィスの仕事はテレワークに変わろうとしている中、現場のテレ ワークはなかなか進まないのが現状です。一方自動車をはじめ建機・農機の自動化も進んではいますが、様々な法規制をクリアするにはまだまだ時間がかかると思われます。
このような背景から、株式会社諸岡は現場のオペレーター不足の解消や安全作業の実現に向けた遠隔操縦の開発に取り組んでまいりました。これまで危険な場所などでは、オペ レーターが重機に乗らず、数百メートル離れた場所から目視でラジコン操縦を行ってきました。今回の実証実験では数十キロ離れた場所から、ARAV社が開発したシステムにインタ ーネットで接続し、スマートフォンの画像と操作だけで遠隔操縦ができることを確認することができました。
本機械と操作の主な特徴は以下の通りです。
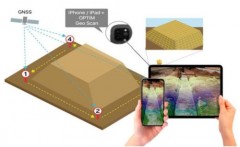
(1)本機械は㈱諸岡製ゴムクローラ運搬車 MST-2200VD で電子制御により走行するモデルです。本機の稼働場所は㈱諸岡 Ami R&D Center(茨城県稲敷郡阿見町飯倉)でスマートフォンによる遠隔操縦場所は㈱諸岡本社(茨城県龍ケ崎市庄兵衛新田町)で、直線で約 12km 離れています。


(2)スマートフォンによる遠隔操縦システムについては、まず ARAV 社の Web Controller にインターネットで接続し、ID・パスワードによりスマートフォンに機械からの映像と操作パネルが現れます。スマートフォンのタッチパネルを操作することにより、警告音・ エンジン回転数・ヘッドライト・ウインカーなどの操作とダンプの昇降や前後左右の走行操作が可能です。今回は安全の為エンジンの ON・OFF は現地で行いました。現行の 4G 環境でもタイム差を極力低減したスムーズな遠隔操作でアップダウンのあるテストコースを約 200m 走行しました。
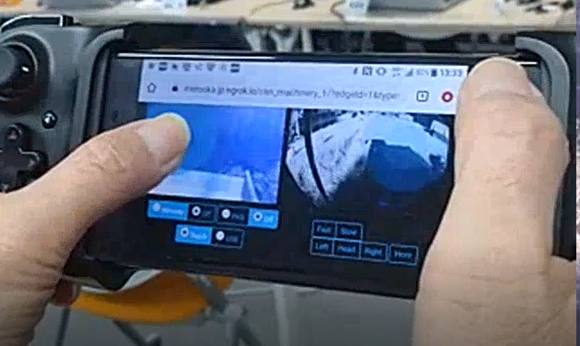
タッチパネルを指で操作

遠隔操作による無人運搬車
現行のシステムを利用すれば数千キロ離れた場所からの遠隔操縦も可能です。今後両社は実現場において本技術の検証を継続し、建設・農林業分野の「現場のテレワーク」実現に向け技術開発を進めてまいります。

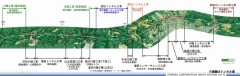
Morooka Ami R&D Center と今回の遠隔操縦による走行経路
最終更新:2021/02/0813:05