日野自動車 レベル4自動運転トラックの社会実装に向けた実証開始
2025/10/2112:19配信

~新東名高速道路でテーマ3事業最終年度の総合走行実証を実施~
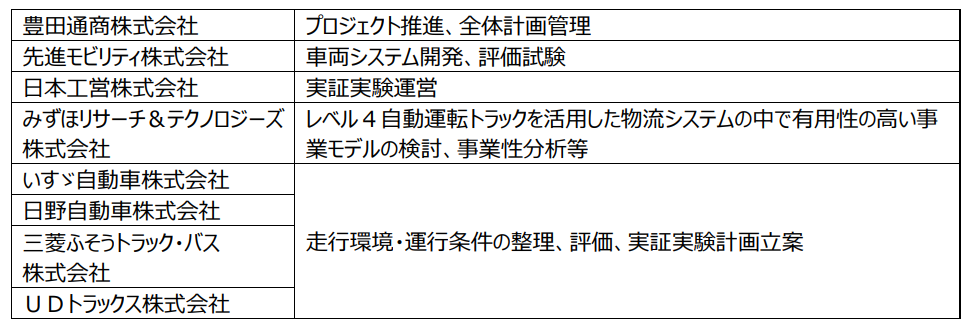
豊田通商株式会社
先進モビリティ株式会社
日本工営株式会社
みずほリサーチ&テクノロジーズ株式会社
いすゞ自動車株式会社
日野自動車株式会社
三菱ふそうトラック・バス株式会社
UDトラックス株式会社
豊田通商株式会社、先進モビリティ株式会社、日本工営株式会社、みずほリサーチ&テクノロジーズ株式会社の4社は、経済産業省および国土交通省が推進する「自動運転レベル4※1等先進モビリティサービス研究開発・社会実装プロジェクト(RoAD to the L4)」の「高速道路における高性能トラックの実用化に向けた取り組み(テーマ3)」※2を2021年度から受託し、レベル4自動運転トラックの社会実装に向けた技術開発と環境整備を進めています。
本日より、上記受託者4社と商用車メーカーのいすゞ自動車株式会社、日野自動車株式会社、三菱ふそうトラック・バス株式会社、UDトラックス株式会社の4社は、テーマ3事業の最終年度にあたる取り組みとして、新東名高速道路において、これまでの検証・実証の集大成としての総合走行実証を開始しました。

UDトラックス、いすゞ、先進モビリティ、日野、三菱ふそうの自動運転実験車両
1.テーマ3事業の目的と経緯
ドライバー不足などの社会課題解決に向け、受託者4社は、商用車メーカー4社および物流事業者をはじめとする関係者とともに、官民が一体となって2026年度以降の幹線道路における自動運転トラックの社会実装を目指しています。
これまで、高速道路周辺の物流施設やサービスエリア(SA)などの中継エリア間における単独での無人走行の実現を目指し、必要な外部インフラ機器からの支援、監視・管理などの運用、車両機能の検証など、レベル4自動運転トラックを実用化するための環境整備を行ってきました。
昨年度の走行実証では、新東名高速道路の駿河湾沼津SA~浜松SA間において、自動発着システム(車両が自動で発車や駐車を行う機能)、緊急停止能力(異常発生時等に車両が停止するための制動機能)、先読み情報支援(ITSスポット※3などの路側機器から発信される故障車や落下物情報などを用いて車線変更等を行う機能)、遠隔監視などの機能の確認と検証をそれぞれ個別に行ってきました。
2.総合走行実証の概要
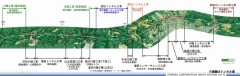
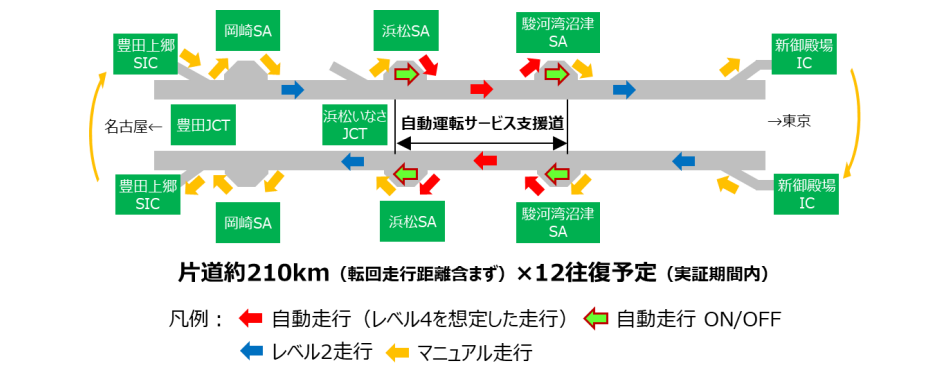
テーマ3事業の最終年度となる今回の実証では、自動運転サービス支援道※4を含む新東名高速道路(新御殿場IC~岡崎SA)において、これまで個別に検証してきた以下の機能について、総合走行実証として一連の流れで実施します。
- 自動運転サービス支援道での「自動走行(レベル4を想定した走行)」およびその他区間での「レベル2走行」※5
- 駿河湾沼津SAおよび浜松SAでの自動発着・合流支援による自動合流
- 路側機器による先読み情報支援による自動車線変更・自動速度調整
- 異常時対応を含む運行監視機能の評価
【総合走行実証の走行イメージ】
3.今後の取り組み
今回の総合走行実証は、2025年12月までを予定しており、2026年度以降の自動運転トラックの社会実装に向けて、技術面・運用面での環境整備の標準化に資する検証を行います。なお、この検証の成果については、今後、テーマ3事業の総括として、「高速道路でのレベル4自動運転トラック導入の手引き」(インフラ整備者・自動運転車両提供者向け)、「自動運転トラック活用ガイドブック」(物流・運送事業者向け)を取りまとめる予定です。
4.各社の役割
※1 特定の走行環境条件を満たす限定された領域において、自動運行装置が運転操作の全部を代替する状態。
(参考)国土交通省HP:https://www.mlit.go.jp/report/press/content/001377364.pdf
※2 無人自動運転サービスの実現および普及に向けて、4つの取り組み(テーマ1~4)が設定されており、「高速道路における高性能トラックの実用化に向けた取り組み(テーマ3)」はそのうちの一つ。
(参考)経済産業省HP:https://www.meti.go.jp/policy/mono_info_service/mono/automobile/Automated-driving/automated-driving.html
※3 ITSスポットとは、道路交通情報を車両と双方向でやりとりする、路車間通信のためのインフラで、道路上に設置された情報通信装置。ドライバーはリアルタイムの交通情報や安全情報を受け取ることができる。
※4 自動運転車両の走行を支援するために整備された道路区間。高速道路や一般道路において、路側センサーや通信設備を活用し、自動運転車の運行を支援する。
※5 「レベル2走行」とは、車間距離制御+車線維持支援を基本とする走行で、ドライバーはハンドル等を確実に操作できる状態で運転すること。 「自動走行(レベル4を想定した走行)」とは、前記レベル2走行をベースに合流支援および前方障害の先読み情報支援を利用し、ドライバーがハンドルから手を離したハンズオフの状態で運転すること。
最終更新:2025/10/2112:33