「イクシス」のタグ一覧 (5件中1~5件を表示)
-

日立建機 計画から施工までを一元管理するシステムと接続し、油圧ショベルによる自律運転の共同実験を実施
施工会社のシステムと建設機械を接続する汎用的なインターフェースを構築 2024 年 3 月 25 日 共同実験の様子 日立建機株式会社(執行役社長:先崎 正文/以下、日立建機)は、2023 年 11 月 14 日から2024 年 3 月 21 日にかけて、計画から施工までを一元管理するシステム上で、油圧ショベルが自律運転で掘削作業を行う共同実験を、前田建設工業株式会社(代表取締役社長:前田 操治/以下、前田建設)と株式会社イクシス(代表取締役 Co-CEO:山崎文敬、狩野高志/以下、イクシス)と行いました。共同実験を通して、日立建機は、施工会社のシステムと油圧ショベルを接続する汎用的なインターフェースを構築しました。 昨今、建設業界では、少子高齢化や技能労働者不足といった問題に対応するため、建設機械の自律運転技術の開発が進められています。自律型建設機械が多様な施工現場で稼働するためには、施工計画や施工管理のシステムと自律型建設機械を接続させる必要があります。さらに、自律型建設機械を普及させるためには、施工会社を問わず、接続できる汎用的なインターフェースが必要です。 日立建機は、「人、機械、現場環境」の情報を相互に共有することで、人と機械が「協調して」働き、安全性と生産性を両立する「協調安全」の施工現場の実現をめざしています。具体的には、機械やセンシングシステムで収集した情報*に基づいて、人への注意喚起や建設機械の制御を行い、現場全体を安全な方向に導きながら生産性の高い施工を行います。このような現場を実現するため、2020 年 8 月には自律型建設機械向けシステムプラットフォーム「ZCORE(ズィーコア)」を開発しました。*建設機械の位置・稼働情報、作業員の位置・生体情報、作業進捗による地形の変化、気象予報などのさまざまな情報。今回の共同実験では、前田建設が開発した BIM/CIM データに基づき計画から施工まで一元管理するシステムと、複数の自律型建設機械を接続する最適なインターフェースを検証することができました。今後、日立建機は、特定の施工会社に関わらず多様な施工会社のシステムと接続できるように、インターフェースの改良と自律型建設機械の開発を推進していきます。 ■共同実験の概要 1.実施時期 2023 年 11 月 14 日~2024 年 3 月 21 日 2.場所 前田建設 ICI 総合センター(茨城県取手市寺田 5270) 3.内容と役割分担 (1)BIM/CIM データ(工事全体の施工計画モデル)から、油圧ショベルの作業内容を具体化した「作業計画モデル」を自動生成・・・前田建設 (2)「作業計画モデル」を基に、複数の油圧ショベルに対して作業を指示(指示の例:Aの範囲の土を掘って、Bの範囲に移す)・・・前田建設、イクシス (3)油圧ショベルが、指示された内容に沿って自律運転で掘削作業を実施・・・日立建機 ・関連情報 ・日立建機公式 YouTube 「ZCORE 施工システムと油圧ショベルの連携による自動施工」・2024 年 3 月 25 日 前田建設ニュースリリース ・2024 年 3 月 25 日 イクシスニュースリリース・2020 年 8 月 19 日 日立建機ニュースリリース 自律型建設機械向けシステムプラットフォーム「ZCORE」 を開発
2024/03/25 14:24 日立建機株式会社
-

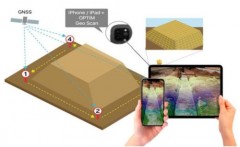
トラス桁内もしっかり点群化!イクシスが3Dスキャナー持ち上げロボを開発
3Dレーザースキャナーは、既存構造物を高精度に3Dデータ化するのに有効な機器です。 ただ、三脚に据え付けて使う地上型タイプは計測の高さに限度があり、どうしても構造物を“見上げる”ような計測となるため、橋桁内部のトラス構造など、込み入った部分の点群計測には使いづらいのが実情でした。 この問題を解決するため、インフラ用ロボットメーカーのイクシス(本社:川崎市幸区)が画期的なロボット「VAN-BO」を開発。2019年11月に発売することを予定しています。 ナ、ナ、ナ、ナント、 3Dスキャナーを持ち上げ ることにより、高い視点から点群計測を行うものなのです。(イクシスのプレスリリースはこちら) 地上型3Dレーザースキャナーを昇降させるロボット「VAN-BO」(以下の写真、資料:特記以外はイクシス) 使用する3Dスキャナーは重さ1kgのライカ「BLK360」など(写真:家入龍太) このロボットには、自動昇降型(3~4.5m高)と、マニュアル昇降型(8m)の2タイプが用意されています。 3Dレーザースキャナーを高い位置に持ち上げて計測できるので、橋桁の裏や工場の天井付近にある設備など、三脚に据え付けた状態では計測しにくかった部分もしっかり点群化できるようになります。 ロボットの大きさは幅300mm×長さ500mm×高さ1815mmで、重量は約33kg(3Dスキャナーは含まず)です。電源は外部から給電し、遠隔操縦が可能です。 開発に当たっての実証実験や取得データの精度検証、および今後の商品供給には、ライカジオシステムズが協力しています。 「VAN-BO」によって計測した橋桁裏のトラス構造の点群データ。これまではこうした点群化は難しかった 三脚に据え付けて計測した点群(左)と「VAN-BO」によって持ち上げて計測した点群(右)の比較。高い視点からだと、配管設備などのくっきりと点群化できる 搭載可能な3Dスキャナーは、BLK360のほか、 重量5kgまでの機種 なら他のメーカーの製品にも対応できます。 用途としては、橋梁や道路などの社会インフラや、工場・プラントの建物や設備などの計測を想定しています。 3Dレーザースキャナーによる点群計測だけでなく、いろいろな角度から撮った大量の写真をパソコンで処理して3Dモデル化する「フォトグラメトリー」でも、このロボットが活躍しそうですね。 気になるお値段は「オープン価格」です。2019年10月9日~11日まで東京ビッグサイト開催されている展示会イベント「建設テック2019」(主催:日経BP社)でも、この製品が参考出展されているそうですので、ご興味のある方はどうぞ!
2019/10/10 10:43 株式会社イエイリ・ラボ
-

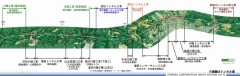
ロープウエー型ロボで3Dモデル化!凸版印刷とイクシスがインフラ点検システム開発
少子高齢化による労働力不足に対応するため、インフラの点検・維持管理分野では、構造物を一度、3Dモデルやデジタル写真などのデータにしてから、コンピューターを使って損傷箇所を見つけたり、管理したりという方法が導入されつつあります。 そこで問題となるのが、インフラの3Dモデル化です。これまではドローン(無人機)による空撮や、3Dレーザースキャナーを使って点群データ化する方法が使われてきましたが、橋梁のように狭くて複雑な部分がある構造物の内部では、高精細な画像を取得するのが困難でした。 そこで凸版印刷とイクシス(本社:川崎市幸区)は、両社の独自技術を融合させて「社会・産業インフラ向け三次元形状計測・生成・解析プラットフォーム」を共同開発することになりました。 構造物の写真を撮るのに使われる方法には、 ナ、ナ、ナ、ナント、 ロープウエー型ロボット も使われるのです。(凸版印刷のプレスリリースはこちら) 構造物の写真撮影に使われるロープウエー型ロボット「Rope Stroller」(写真:イクシス) イクシスが開発したワイヤつり下げ型目視点検ロボット「Rope Stroller」というものです。橋脚の間にワイヤを水平に架設して、これにぶら下がって移動しながら、中央に取り付けたカメラで構造物に近づいて写真撮影できるものです。 風やワイヤの張り方で本体が傾いても、中央に搭載したジンバル(雲台)機構が働いて、カメラを一定の向きに固定します。 電源は外部から電源ケーブルで給電し、操作もLANケーブルで遠隔操縦します。 Rope Strollerの本体部(写真:イクシス) 橋桁下での使用イメージ(資料:イクシス) 橋桁裏を撮影した写真(写真:イクシス) 橋梁の点検では、ドローンを使った方法も行われていますが、風に弱い、構造物との接触が心配、長時間の連続飛行が難しいなどの問題もあります。 その点、このロープウエー型ロボットは、ワイヤさえ張れば、長時間、じっくりと撮影ができるのでいいですね。また、ワイヤを上下方向に張れば、煙突や立て配管なども撮影できるそうです。 こうして撮った写真から3Dモデルを作るのが、凸版印刷の技術です。同社は民生品のデジタルカメラで撮影した写真だけを使って、高精度の3Dモデルを自動的に生成する技術を持っています。 写真から3Dモデルを作る「フォトグラメトリー」と言われる技術の肝となるのが、複数枚の写真に写った同一点を探し出し、対応させる後術ですが、凸版印刷の場合、 1画素以下の精度で推定 することができるのです。 地表の撮影写真(左)から自動生成した3Dモデル(右)(資料:凸版印刷) また、イクシスはAI(人工知能)による空間の解析や、BIM(ビルディング・インフォメーション・モデリング)、CIM(コンストラクション・インフォメーション・モデリング)を使った制御技術も持っていますので、出来上がった3Dモデルを解析する作業でも、強みを発揮しそうです。 両社はこのシステムが、社会・産業インフラの現場で広く活用されるプラットフォームになることを目指して共同開発を推進し、インフラ点検企業との実証実験なども行っていきます。そして2020年度中の提供開始を目指すとのことです。 「社会・産業インフラ向け三次元形状計測・生成・解析プラットフォーム」のイメージ図(資料:凸版印刷) このプラットフォームについては、2019年7月24日から26日まで、東京ビッグサイトで開催される「第11回インフラ検査・維持管理展」で、イクシスのブース(W1-G37)で展示される予定ですので、ご興味のある方はどうぞ!
2019/07/10 10:51 株式会社イエイリ・ラボ
-

BIM、測量機と連携!安藤ハザマが施工自動化に向けて自律走行ロボを開発
BIM(ビルディング・インフォメーション・モデリング)やCIM(コンストラクション・インフォメーション・モデリング)など、3Dモデルで設計や施工図作成を行う建設会社が、3D技術をさらに施工現場での生産性向上に取り組むきっかけとなる機器の一つとして、トプコンの「LN-100」という測量機があります。 LN-100は、トプコンの「杭ナビ」という墨出しシステムに使われているもので、いわば“望遠鏡のないトータルステーション”のようなものです。 安藤ハザマとイクシス(本社:川崎市)は、LN-100を使って建築工事の様々な作業を自動化するロボット用の台車を共同開発しました。 その名も「BIMデータと連携した自律走行ロボット」というもので、BIMモデル上で移動指示を行うとその場所まで ナ、ナ、ナ、ナント、 高精度で自律走行 するものなのです。(安藤ハザマのプレスリリースはこちら) BIMモデル上で移動指示を行い、LN-100(後方)と連携して自律走行するロボット(以下の写真、資料:安藤ハザマ) ロボットには測量用のプリズムが搭載されており、LN-100が自動追尾して常に自分の位置を高精度の3D座標で認識するほか、向きや傾きも測定できます。 その位置データを無線LANでロボットやコンローラーとなるタブレット端末などで交換することにより、移動指示と位置確認が行えるのです。 またロボットにはBIMモデルやレーザースキャナーと連携して自己位置推定や地図作成を行う「SLAM(Simultaneous Localization and Mapping)」というシステムも搭載されており、全方位移動台車によってどの方向にも自律移動します。 コントローラーに使うタブレット端末などに表示するBIMモデルの描画には、ゲームエンジンを採用しているので軽快に動作します。 BIMモデル上で移動指示や現在位置の表示を行う位置認識・移動制御システム しかし、工事現場には脚立や資材、作業員など、測量機にとって障害となる様々なものが存在します。これらがロボットとLN-100の間に入ると、位置の自動追尾がロスト(見失ってしまうこと)してしまい、しばしば作業が中断することになりそうですが、大丈夫なのでしょうか。 その点は、現場の実情を熟知した安藤ハザマが開発しただけあって、ちゃんと答えが用意されていました。実は、ロボットには 4個のプリズムが搭載 されており、1つのプリズムがロストするとそのプリズムは引っ込み、別のプリズムが代わりに出てきて自動追尾を中断なく行えるようになっているのです。 ロボットの四隅には高さを変えて4個のプリズムが搭載されている。外形寸法はプリズム格納時で幅770×奥行き770×高さ800mm、重量60kg、走行速度0.5m/秒 今後、安藤ハザマはロボットの軽量化や自己位置認識技術の高度化を図り、施工を自動化する装置の開発など、実用化や現場への展開を目指していきます。 このロボットの用途は無限にあると言っても過言ではありません。資機材の運搬はもちろん、カメラや3Dレーザースキャナーを取り付ければ検査や進ちょく管理に活用できそうです。 また、ロボットアームを取り付ければ材料の取り付け作業や位置決めなどのアシスト、XYプロッターやインクジェットプリンターを搭載すれば、自動墨出しもできそうですね。あなたなら、何をこのロボットに載せますか?
2019/06/20 11:16 株式会社イエイリ・ラボ
-

AIで損傷判定!押して歩く「床面ひび割れ検知ロボ」をイクシスが発売
物流倉庫や工場などの維持管理では、床面のひび割れなどの損傷状況をチェックし、記録するという業務があります。 これまではフロア内の作業が止まっている夜間に作業員がフロアを歩きながら床面の損傷を見つけ、写真撮影などで記録するという方法が採られてきました。 この作業を軽減するため、業務用ロボットの開発を手がけるイクシス(本社:川崎市)は、床面ひび割れ検知ロボット(手動式)「Floor Doctor」を開発、発売しました。 ナ、ナ、ナ、ナント、 押して歩くだけ で、床面の撮影と位置情報をセットで取得し、図面との重ね合わせができるのです。(イクシスのプレスリリースはこちら) 床面ひび割れ検知ロボット(手動式)「Floor Doctor」(以下の写真、資料:イクシス) 「イクシス」のウェブサイト。ロボットやAI、IoTに強そうだ ロボットといえども、「手動式」とうたっているように、自転車のハンドルやブレーキのようなものが付いています。 車輪には移動距離計測用センサーが搭載され、赤色レーザーで床面に撮影範囲が表示されます。このレーザー光を頼りに直線的に進みながら、床面の撮影を行うのです。 手元のモニターには、カメラの実映像が表示されるので、撮影範囲を視覚的に確認できます。 そして、撮影した画像は AIで損傷判定 を行うことにより、検査報告書の作成時間を短縮することができます。 AI(人工知能)によるひび割れなどの検知システムは、いろいろな会社で開発されていますが、もはや人間の目視による点検よりも高性能な域に達しています。 今回は手動式のロボットですが、これがお掃除ロボのように自動的に走行するようになると、床面の点検や損傷部分の発見も無人で行えるようになりそうですね。
2019/05/27 18:41 株式会社イエイリ・ラボ


- 1
- 1

新着お知らせ
ニュースアクセスランキング
-
1
![]()
三菱ふそう 燃費性能を向上した新型6R30エンジンを搭載し、フルモデルチェンジした大型トラック「スー...
2023/10/2611:31 三菱ふそうトラック・バス株式会社
-
2
![]()
BHP 社サウス・フランク鉄鉱山(西オーストラリア ピルバラ地区)へ 41 台の超大型ダンプトラック...
2019/09/0511:12 株式会社小松製作所
-
3
![]()
国交省がiPhoneによる点群計測を正式採用へ! 小規模ICT施工への2022年度導入を目指す
2021/09/0817:30 株式会社イエイリ・ラボ
-
4
![]()
清水建設の新東名現場を直撃! そこは“i-Constructionの総合商社”だった
2020/11/0417:50 株式会社イエイリ・ラボ
-
5
![]()
三菱ふそう 金沢支店を移転しオープン
2021/07/2618:12 三菱ふそうトラック・バス株式会社