壁面に吸い付いてタイルをコンコン!高松建設らが外壁点検ロボを開発
2019/07/1709:06配信

タイル張りのビルやマンションなどの外壁が劣化すると、外装タイルがはく落する恐れがあります。
そのため、大規模修繕などのとき、建物を足場で囲ったり、ゴンドラを設置したりして壁面全体をハンマーでたたいて異常音がないかを検査員が診断する打診調査という方法が一般に行われています。
しかし、この方法だとコストや工期の負担が大きく、検査員の技量や経験によって検査結果が大きくばらつく可能性がありますね。
そこで高松コンストラクショングループの高松建設(本社:大阪市淀川区)、青木あすなろ建設(本社:東京都千代田区)は、非破壊検査(本社:大阪市)と共同で、「壁面走行ロボットによる外壁検査システム」を開発しました。
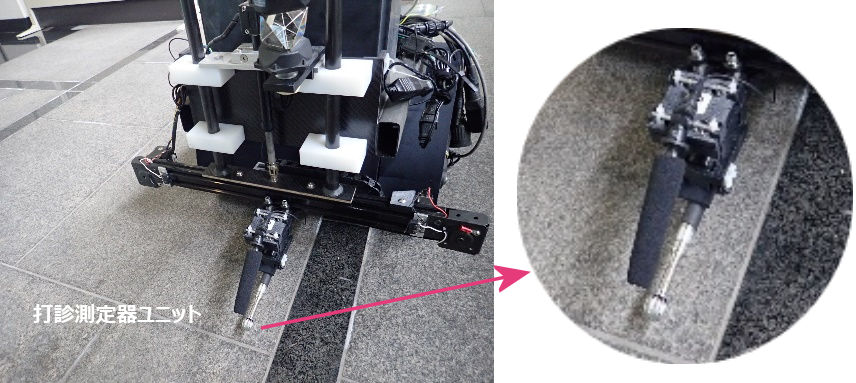
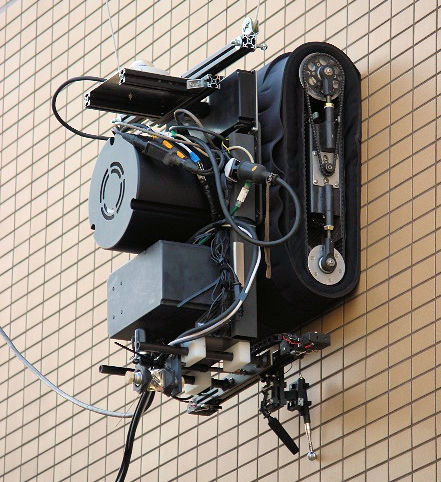
壁面をハンマーでたたく打診調査機能が付いた壁面走行ロボット(以下の写真、資料:高松建設)
壁面をハンマーで打診した音をマイクで拾うとともに、カメラで撮影して診断結果をデータとして蓄積するものですが、
ナ、ナ、ナ、ナント、
壁面に吸い付いて昇降
するのです。(高松建設のプレスリリースはこちら)

タイル壁面に吸い付いて昇降する壁面走行ロボット
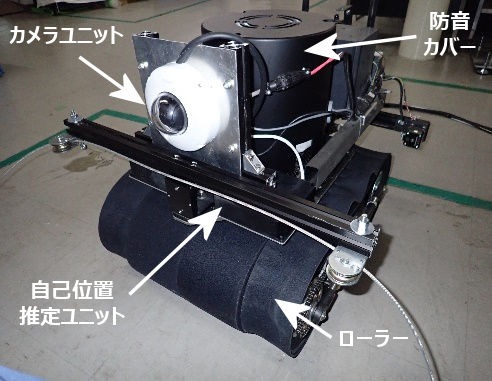
検査作業中の壁面走行ロボットの拡大写真
このロボットは長さ610×幅533×高さ440mmで重量は約30kgと比較的、小型で操作も簡単です。
ロボットの中心部には、空気を吸引する「バキュームチャンバー」が搭載されており、それを囲むように走行用のローラーが取り付けられています。
この機構によって壁面の材質にはかかわらず、壁に吸い付きながら、ローラーの回転で壁面を昇降できるのです。
その最大速度は64mm/秒で19mm程度の段差を乗り越えられるほか、緩やかな曲面を持った壁も走行できます。
このロボットに打診測定機やカメラを搭載し、タイルの打診音と写真によってタイルはく離やクラックなどの検査を行います。
中央部に空気を吸い込むバキュームチャンバーが搭載されたロボットの内部
そして冒頭に掲載したロボットの写真をよく見ると、
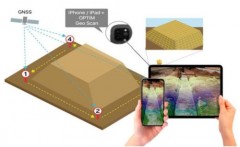
測量用のプリズム
も搭載されていることがわかります。
おそらく、地上から自動追尾型トータルステーションなどで、正確な現在位置を把握する仕組みも備えているのでしょうね。
そのため、正確な劣化位置をデータ化し、パソコンで外壁面の劣化状況を図で示すことができます。
高松建設らは、比較的規模の小さい建物や、隣地境界との空きが少ない建物の調査に適したシステムとしており、2019年8月から、3社共同で実際の建物での運用を始めます。
最終更新:2019/11/2018:08