酒井重工業と JIG-SAW、熊谷組、 自律走行式振動ローラを活用した実証実験を実施
2021/12/2317:16配信

2021 年 12 月 23 日
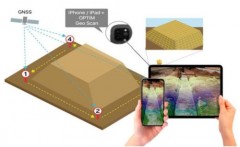
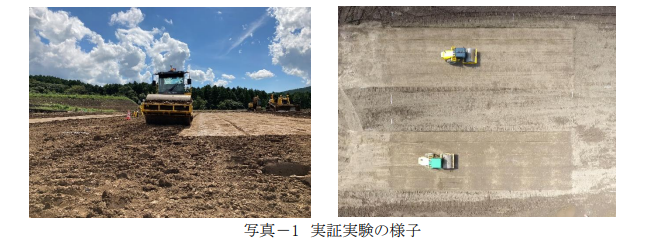
酒井重工業株式会社(本社:東京都港区、以下:酒井重工業)は、JIG-SAW 株式会社(本社:東京都千代田区、以下:JIG-SAW)、株式会社熊谷組(本社:東京都新宿区、以下:熊谷組)と共同で、熊谷組の施工現場において ASCS for Compaction Equipment プロジェクト※1の一環として自律走行式ローラを活用した実証実験を実施いたしました。(写真-1)
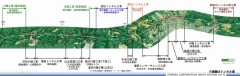
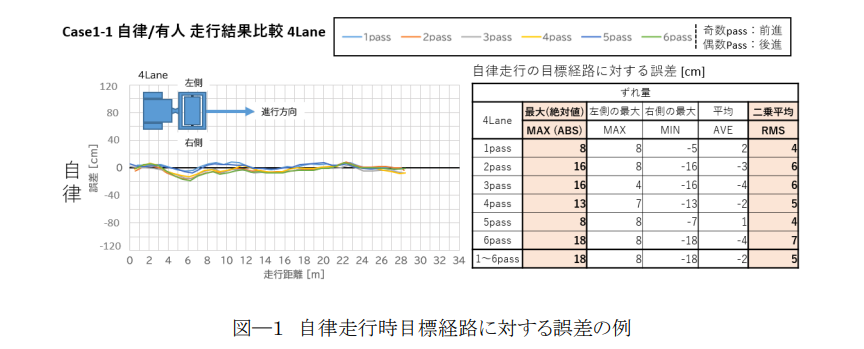
今回の実験では、自律走行性能の精度確認をするために、予め生成した目標経路に対して、どの程度追従できているか(以下、経路追従性)を確認いたしました。その結果、目標経路からのズレは最大20cm程度で、経路追従性能が極めて高いことが確認されました。(図-1)
さらに、自律走行と有人作業とを比較するため試験エリア内で規定転圧回数を 6 回(ラップ箇所は 12 回)、横断方向に 5 レーンを設定しました。工区全体の面積を100%とする場合、規定 6 回で転圧された面積は、有人作業では25.9%、自律走行では91.5%と約 3.5 倍に向上しております。(図-2)
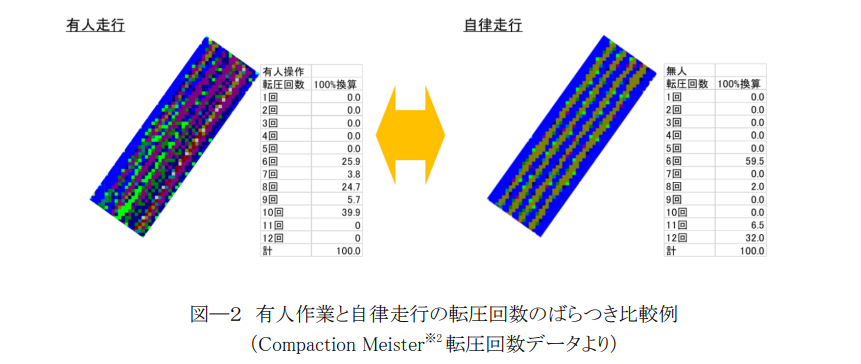
また、有人作業では 6 レーンの転圧となってしまいましたが、自律走行では前述の通り正確な転圧が可能なため、設定通り 5 レーンの転圧となることから、自律走行式振動ローラにより現時点で20%の作業の省力化が可能であることが確認できました。
今後は施工現場への本格導入に向けた取り組みを加速してまいります。
※1:ASCS for Compaction Equipment プロジェクトについては下記を参照ください。
https://www.sakainet.co.jp/news/item/20190613gyoumuteikei.pdf
※2: Compaction Meister
GNSS およびデータクラウドを用いたローラの転圧回数管理または振動ローラ用の弊社加速度応答法(CCV:Compaction Control Value)による締固め品質用の表示・管理ツール
https://www.sakainet.co.jp/products/related/compactionmeister.html
最終更新:2021/12/2317:38